YU-SDGsプロジェクト
プロジェクト検索
プロジェクト検索
ホーム > YU-SDGsプロジェクト検索 > リンク機構を用いた脚部動作の補助に関する研究
目的 |
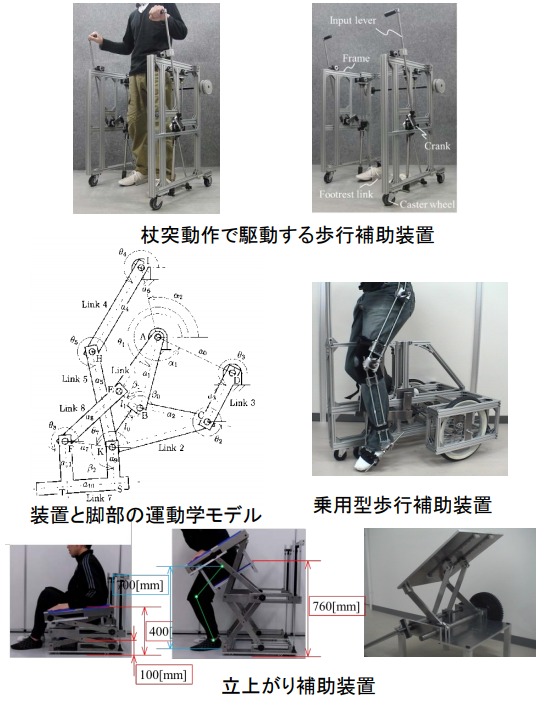
設計手法の提案のみでなく、装置を試作し、評価しながら外部から大きな動力を入力しない形式で、使用者を補助する新たな機構の可能性を探ります。 |
|---|---|
概要 |
平面リンク機構を応用して、歩行や立上がりなどの脚部に負担の大きな動作を補助する装置の設計・製作を行っています。
|
関連サイト |
|
代表者、担当組織 |
南後 淳 |
担当学部 |
工学部 |
連絡先 |
nango@yz.yamagata-u.ac.jp |
このプロジェクトを支援 |
山形大学基金(学部等への支援) |