YU-SDGsプロジェクト
プロジェクト検索
プロジェクト検索
ホーム > YU-SDGsプロジェクト検索 > 全方向駆動歯車に基づく動力伝達機構
目的 |
ロボット工学の研究成果を活かして、積極的に産学連携に取組みます。また、自動化を進めた、より人間に優しい社会への貢献を目指しております。独自の機能を有する機械を機構からCADにより設計し、電子回路により制御できることが私の強みです。 |
|---|---|
概要 |
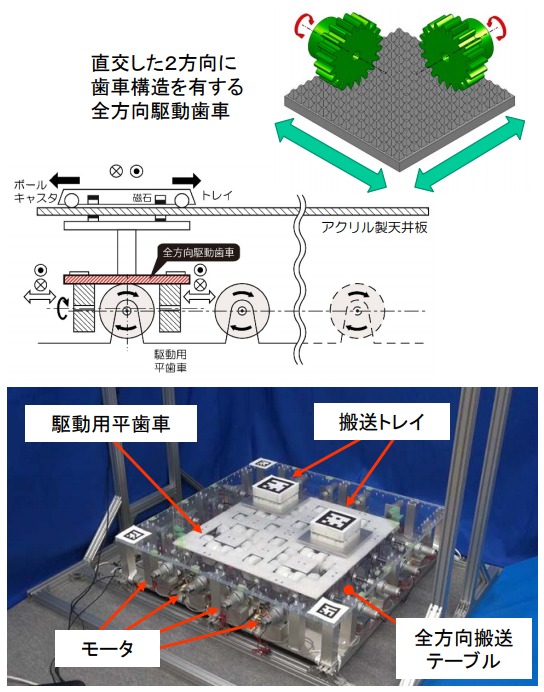
本研究室においては、直交した2方向に歯車構造を有する「全方向駆動歯車」により、前後左右のあらゆる方向に動力を伝達することを可能にした機構を実現しました。これを用いると、磁力カップリングにより追従する搬送トレイを、天井板の上で様々な方向に制御して物体を任意の軌道上に搬送できる「全方向搬送テーブル」などが可能となります。
|
関連サイト |
|
代表者、担当組織 |
多田隈 理一郎 |
担当学部 |
工学部 |
連絡先 |
tadakuma@yz.yamagata-u.ac.jp |
このプロジェクトを支援 |
山形大学基金(学部等への支援) |