YU-SDGsプロジェクト
プロジェクト検索
プロジェクト検索
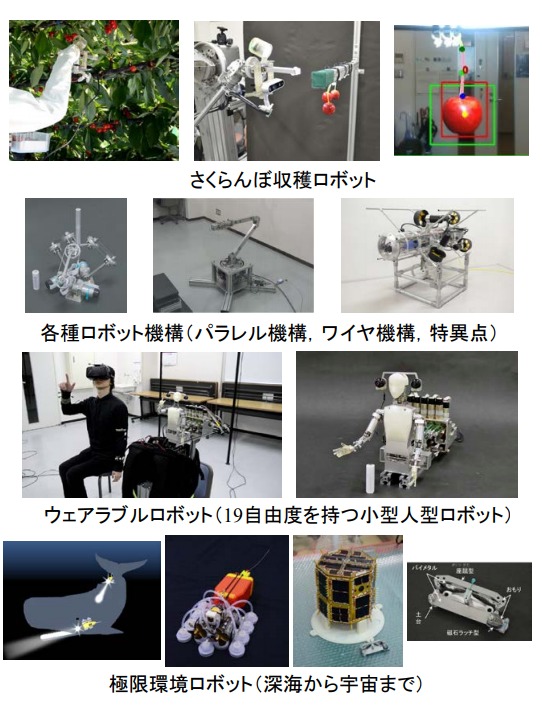
ホーム > YU-SDGsプロジェクト検索 > テレロボティクス 〜深海から宇宙まで極限環境に挑むロボティクス〜
目的 |
パラレル機構,ワイヤ機構を活用した高度な機械設計技術,独自の画像処理からドローンの運用まで行うシステムインテグレーション技術,独創的なヒューマンインタフェース技術が強みです. |
|---|---|
概要 |
テレロボティクスは人間がロボットを遠隔操作するための工学です.人間の能力を空間的・時間的に拡張する技術でもあります.ロボットの自律化と人間の能力を高度に融合させることで,それぞれ単独では達成できない困難な作業を実現することが目標です.ロボットシステムのみならず,操作のためのインタフェース,通信システムなど,全体システムを設計するシステムインテグレーションが重要なカギを握ります.ロボットだけでなく,人間に関する知見も必要になってきます.
|
関連サイト |
|
代表者、担当組織 |
妻木 勇一 |
担当学部 |
工学部 |
連絡先 |
tsumaki@yz.yamagata-u.ac.jp |
このプロジェクトを支援 |
山形大学基金(学部等への支援) |