YU-SDGsプロジェクト
プロジェクト検索
プロジェクト検索
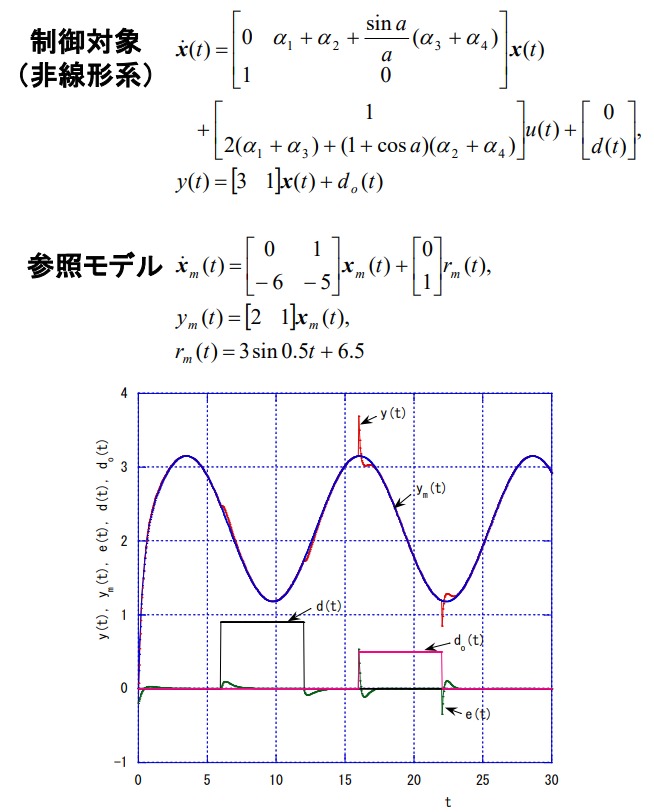
ホーム > YU-SDGsプロジェクト検索 > 非線形・むだ時間系の制御系設計
目的 |
システム制御工学に関連した研究手法や成果を生かして産業界での自動化や省エネを図ります.様々な数理的解析・設計手法を産業界での問題解決に役立てます. |
|---|---|
概要 |
システム制御工学は1970年代から著しい発展を遂げ,古典制御論や現代制御論と呼ばれる理論体系を基礎にし,常に新しい展開を見せています.今日の科学技術を駆使した生産・輸送・社会・環境基盤には,システム制御工学が重要な役割を担っています.
|
代表者、担当組織 |
秋山 孝夫 |
担当学部 |
工学部 |
連絡先 |
aki@yz.yamagata-u.ac.jp |
このプロジェクトを支援 |
山形大学基金(学部等への支援) |