YU-SDGsプロジェクト
プロジェクト検索
プロジェクト検索
ホーム > YU-SDGsプロジェクト検索 > 人工筋肉の開発・制御とソフトロボットへの応用
目的 |
人工筋肉の応用研究を進め、社会で広く使われるアクチュエータを目指します。様々な機能性材料にも目を向け、新機構のアクチュエータ開発にも取り組みます。 |
|---|---|
概要 |
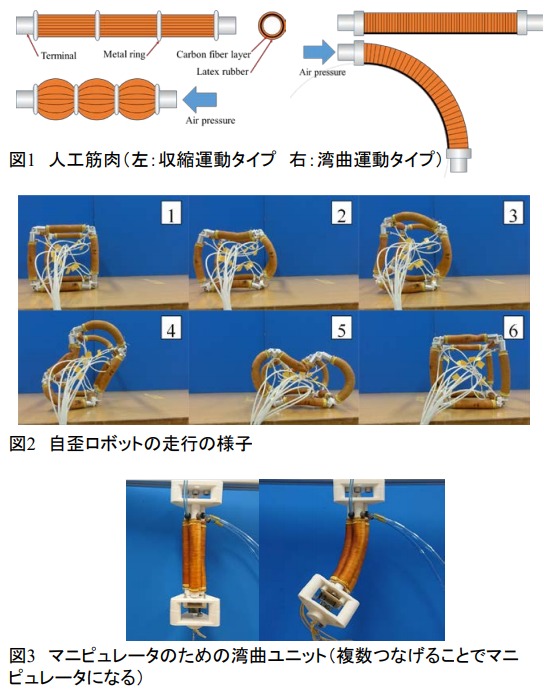
ゴムと繊維素材で構成された空気圧ゴム人工筋肉は圧縮空気で駆動し、繊維の配置によって伸縮や湾曲など様々な動作を生み出します。人工筋肉はその柔軟性や軽さが特徴であり、ロボットに応用することで周囲の人や物と安全に接触することができます。さらに出力密度も高く、実用的なレベルでの作業を行うこともできます。この人工筋肉を構造面、材料面からのアプローチによって改良することで実用化を目指します。
|
関連サイト |
|
代表者、担当組織 |
戸森 央貴 |
担当学部 |
工学部 |
連絡先 |
tomori@yz.yamagata-u.ac.jp |
このプロジェクトを支援 |
山形大学基金(学部等への支援) |