YU-SDGsプロジェクト
プロジェクト検索
プロジェクト検索
ホーム > YU-SDGsプロジェクト検索 > 制御理論とそのロボット制御システムへの応用
目的 |
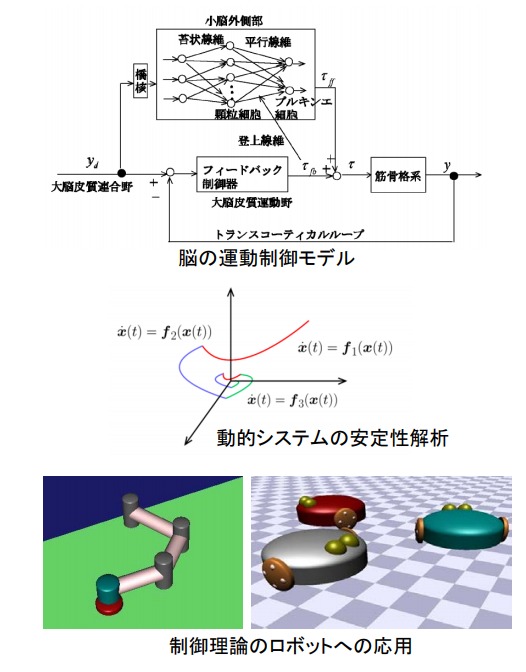
3次元CGを用いたシミュレーションも行っています.制御理論とシミュレーションをさまざまな問題に応用しています. |
|---|---|
概要 |
人間のような滑らかでむだのない動きをロボットにさせるには制御が重要となります.システムを制御するには,理論に基づく制御系設計が有効であり,そのための理論はシステム制御理論と呼ばれています.この研究では,ある種の微分方程式を制御対象のモデルと仮定し,その方程式と制御則の方程式を組み合わせたシステムの挙動を数式を用いて解析していきます.システムが望ましい挙動を示すためにはどのような式を用いて制御すればよいかを考察し,厳密な数学的証明を示しながら新しい制御方法を提案しています.脳の運動制御モデルに基づく制御系設計法や,切り替えを有する動的システムの安定性解析について研究しています.
|
関連サイト |
|
代表者、担当組織 |
村松 鋭一 |
担当学部 |
工学部 |
連絡先 |
muramatu@yz.yamagata-u.ac.jp |
このプロジェクトを支援 |
山形大学基金(学部等への支援) |